Mechanical Engineering Student
Robotic Engineering Student
Robotic Engineering Student
Robotic Engineering Student
Department of Electrical Engineering and Mechanical and Metallurgical Engineering
Universidad de los Andes




Research funded by the National Research and Development Agency of Chile (ANID), through the Fondecyt Initiation projects 11250090 and Fondecyt Regular 1250842

Mechanical Engineering Student

Robotic Engineering Student

Robotic Engineering Student

Robotic Engineering Student

Department of Electrical Engineering and Mechanical and Metallurgical Engineering
In a world where rainfall is becoming increasingly unpredictable, droughts are lasting longer, and summers are unbearably hot, climate change is no longer a distant threat. It is our reality. This global phenomenon, driven mainly by the burning of fossil fuels, deforestation, and industrial emissions, traps heat in the atmosphere and disrupts the water cycle creating constant stress for vegetation.
In this context, urban trees act as the city’s silent guardians. They capture carbon dioxide, the greenhouse gas released into the atmosphere by burning fossil fuels, and convert it into oxygen. They regulate environmental humidity by releasing water through their leaves, preventing streets from flooding or drying out, and they filter air pollutants. For them to continue fulfilling this vital role and mitigating the effects of climate change, we need to know exactly what condition they are in. This includes whether they are growing healthily, resisting damage caused by biological agents such as insects or microorganisms, or being affected by water stress.
A Solution for Tree Censuses
In Chile, tree censuses are not automated, despite the existence of technologies that allow essential information to be collected automatically and accurately. This means that key data such as canopy size, trunk diameter, or the Normalized Difference Vegetation Index (NDVI), all of which are necessary to characterize vegetation, are not properly recorded or systematized.

In search of an innovative solution to this situation, a team of students from Electrical Engineering, Mechanical and Metallurgical Engineering, and the Robotics Major, composed of Jorge Apud, Patricio Hinostroza, Elías Ormeño, and Diego Prudencio, under the supervision of Professor Tito Arévalo from the Department of Electrical Engineering and Mechanical and Metallurgical Engineering, developed a mobile platform as part of the Undergraduate Research course (IPre). This platform uses advanced technology to automatically census trees with much greater precision than traditional alternatives based on visual inspection. Inspired by previous research, the team integrated LiDAR sensors (Light Detection and Ranging) and multispectral cameras. These technologies reveal information imperceptible to the human eye and enable fast, detailed, and accurate vegetation measurement and assessment.
Capturing Information Beyond the Visible
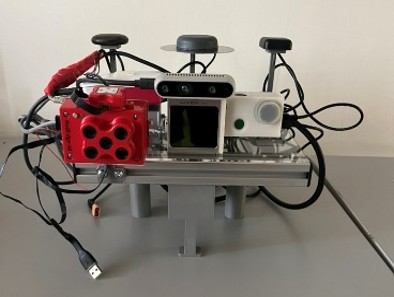
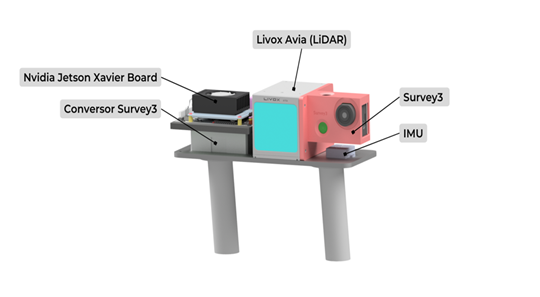
The research team developed a mobile system based on a rechargeable battery powered platform with two main components. The first is a LiDAR sensor, which measures distances using light pulses. The second is a multispectral camera that records wavelengths outside the visible spectrum, such as infrared. This setup also includes a GPS and a light sensor, making it possible to generate point clouds and multispectral images to evaluate foliage vitality and characterize the overall condition of each tree.

Preliminary design of the platform, later refined by the research team.
The Heart That Brings the Platform to Life
For the platform to function as an integrated system, software was developed to coordinate all sensors using ROS, a framework that allows them to be integrated and operate together. Before programming began, current calibration and data fusion methods were reviewed. This process led to the selection of the calibration system developed by the Mechatronics and Robotic Systems Laboratory at the University of Hong Kong (HKU-MaRS) and the adaptation of code provided by the LiDAR manufacturer, LIVOX.
Based on this foundation, successive tests were conducted to correct errors, improve synchronization, and fine tune system performance so that images and three dimensional tree models aligned accurately. In parallel, the code was organized and documented to facilitate understanding and use by third parties, ensuring that the software would be truly open and accessible. Finally, the code was made available on GitHub for anyone interested in exploring or using it.

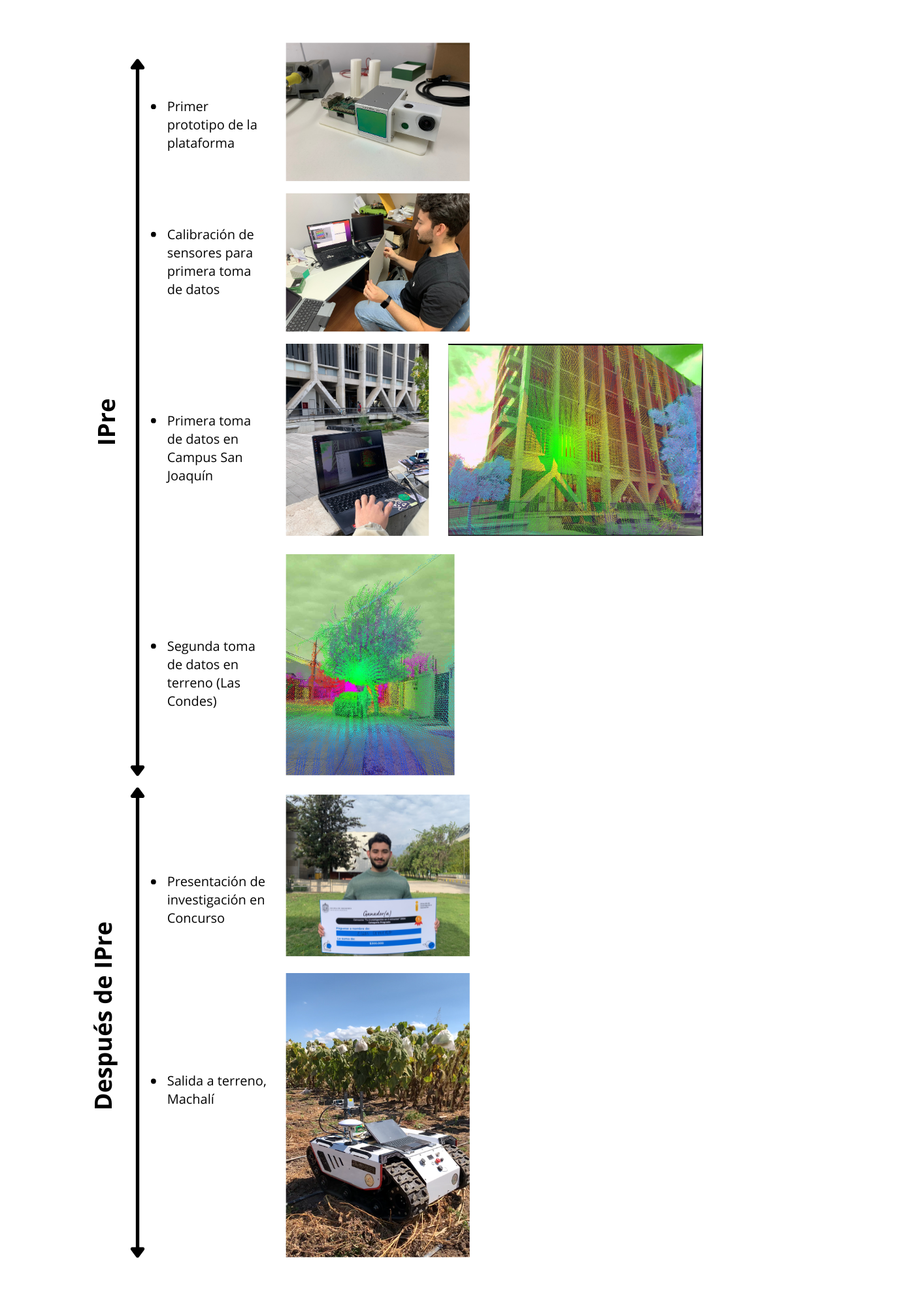
Field data collection and partial results of sensor integration.
Calibrating and Aligning Data Calibrando y alineando datos
To accurately compare images with LiDAR measurements, the team moved from a calibration approach based solely on localization to a more robust method. This involved performing multiple captures in controlled environments and adjusting positioning when necessary. This change made it possible to align both datasets with greater precision.
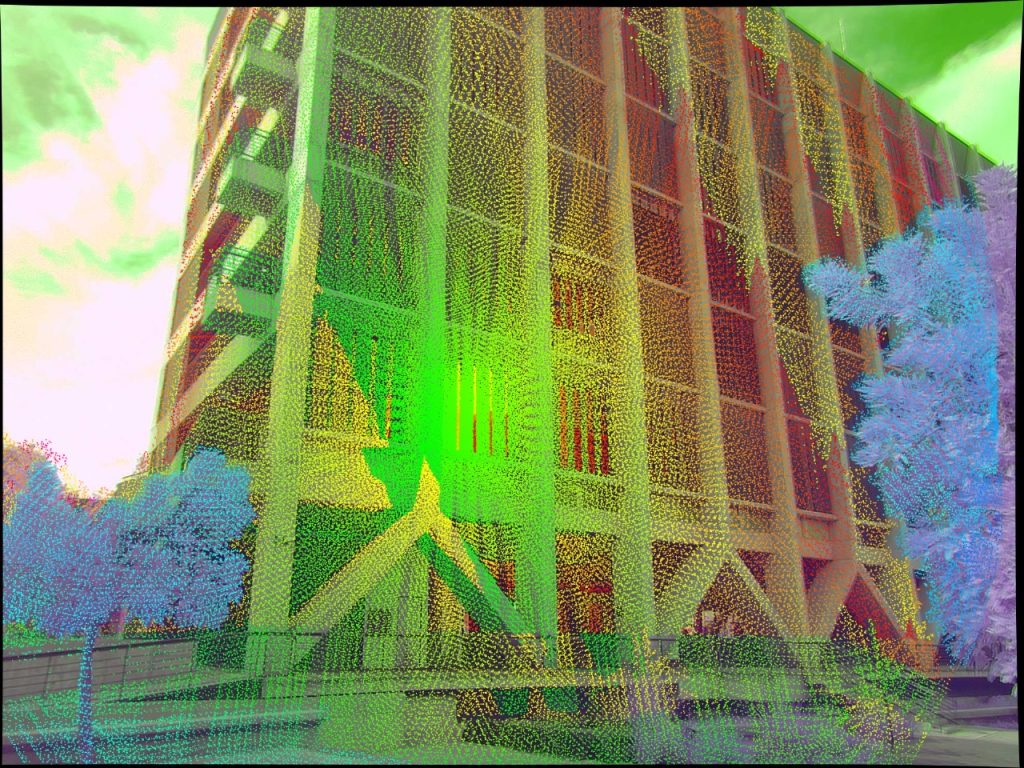
The integration was successful, as LiDAR data and multispectral imagery could be combined both visually and analytically. This facilitated comparisons between images and LiDAR measurements. Nevertheless, there are still improvements to be implemented. In addition, the entire system implementation, including both the platform and its software, was documented and explained step by step. This documentation provides a clear guide for replication and will be published on GitHub once its final review is completed.

Results of the second field data collection after system optimization.
A System That Continues to Grow
Recently, the platform has been updated to incorporate not only a multispectral camera, but also an RGB camera, accelerometers, and Global Navigation Satellite System (GNSS) sensors. With this integration, the research team will be able to carry out georeferenced tree measurements. This means recording their exact location and making it much easier to identify which trees require maintenance.
However, adding these sensors has increased the system’s computational load. The computer currently in use can no longer meet the processing demands of the complete system. Therefore, the next step is to upgrade the hardware by incorporating a Jetson ORIN Nano, which will enable more robust real time data processing.
In addition, the team plans to optimize the power supply system, cabling, and hardware level synchronization between sensors in order to improve the stability and reliability of measurements.


Field data collection using the improved platform in a cherry orchard.
Mechanical Engineering Student
Robotic Engineering Student
Robotic Engineering Student
Robotic Engineering Student
Department of Electrical Engineering and Mechanical and Metallurgical Engineering
Universidad de los Andes
Research funded by the National Research and Development Agency of Chile (ANID), through the Fondecyt Initiation projects 11250090 and Fondecyt Regular 1250842
This project demonstrates that it is possible to address global challenges such as climate change from a different perspective. By observing our trees in greater detail, we can better understand their condition, detect risks, anticipate them, and make informed decisions. The developed system shows strong performance in measuring urban trees. Thanks to the documentation prepared by the team, its replication will be straightforward, allowing other users to continue advancing toward increasingly precise measurements in different environments.
This work also reveals how a more detailed view of vegetation can improve the way we manage any environment, from cities to rural areas. Following the technical improvements introduced, such as the integration of new sensors, cameras, and a more robust processing system, it may be possible to transfer the developed technology to more versatile platforms, such as drones. This would allow monitoring to be expanded to larger and harder to reach areas. In this way, an initiative that today is just beginning to germinate as a small seed has the potential to become a transformative tool for understanding and caring for our territories.
Toward a Greener Future

Mechanical Engineering Student
Department of Electrical Engineering and Mechanical and Metallurgical Engineering
