Mechanical Engineering Student
Department of Mechanical and Metallurgical Engineering

Portada » Development of a dashboard for an autonomous marine vessel

Student in Mechanical Engineering
Recent advancements in robotics and artificial intelligence have impacted many areas of engineering, including transportation and maritime navigation. In this context, technologies that enable vessel autonomy or enhance navigation precision to prevent accidents are becoming essential, particularly for a country like Chile with its extensive coastline.
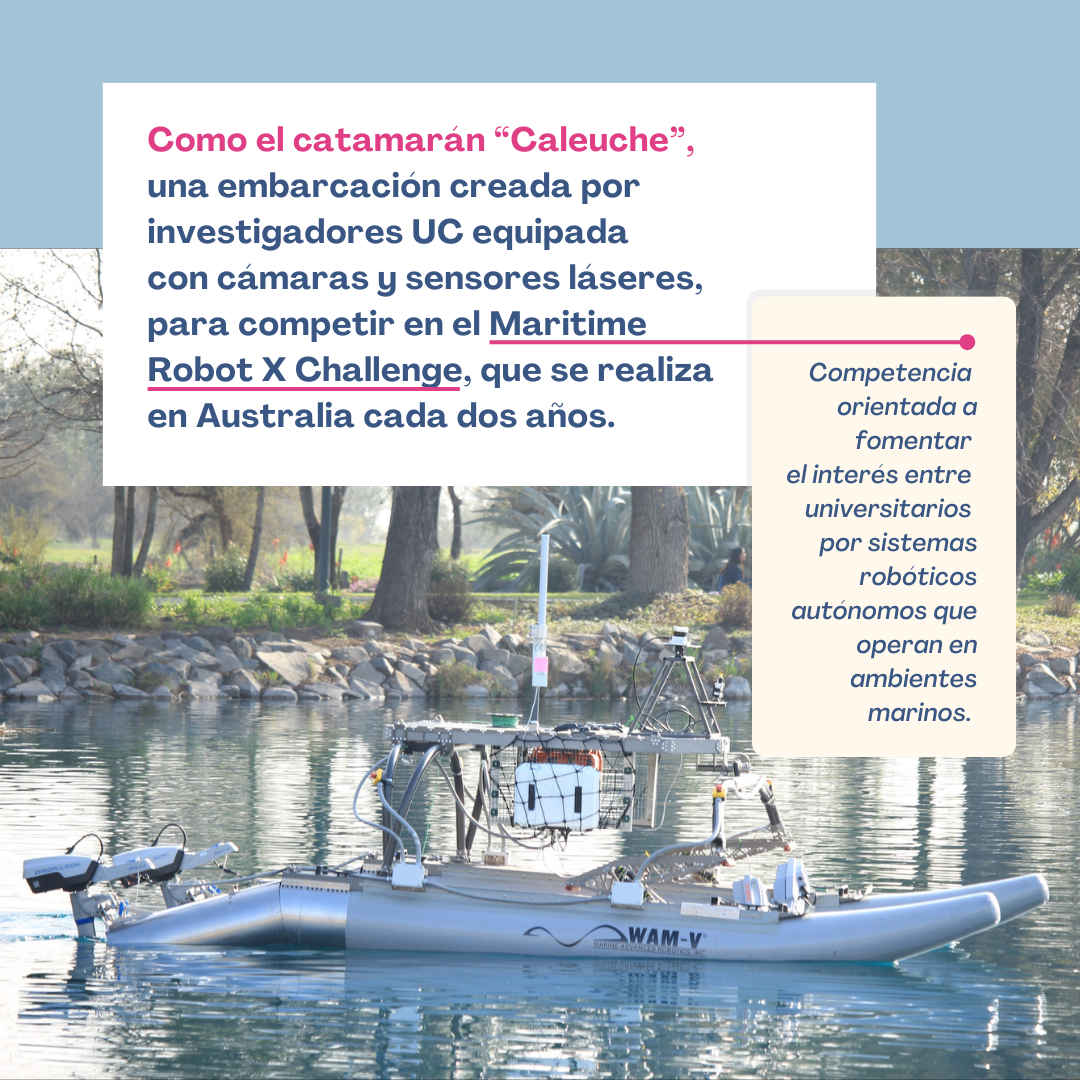
The Caleuche project, named after a mythical ghost watercraft of Southern Chile, emerged in 2022 led by Professor Giancarlo Troni from the School of Engineering. This 5-meter-long, 150-kilogram catamaran is equipped with cameras and laser sensors, specificallly designed to participate in the Maritime Robot X Challenge held every two years in Australia, an international university-level competition that aims to stimulate the interest of students in autonomous robotic systems.
A multidisciplinary team of undergraduates, including Ignacio Segura, a second-year Industrial Engineering student, took part in setting up the catamaran for last year’s event. The main goal was to develop a software interface that used AI technology to interpret incoming data, enabling the robot to make autonomous decisions and navigate a series of aquatic tests effectively.
Ignacio’s work focused specifically on designing and programming a dashboard or graphical interface to autonomously monitor the catamaran’s sensors. This system was designed for early detection of potential navigation problems, particularly those related to connection issues between the sensors and the main computer, ensuring the vessel’s performance during the competition.
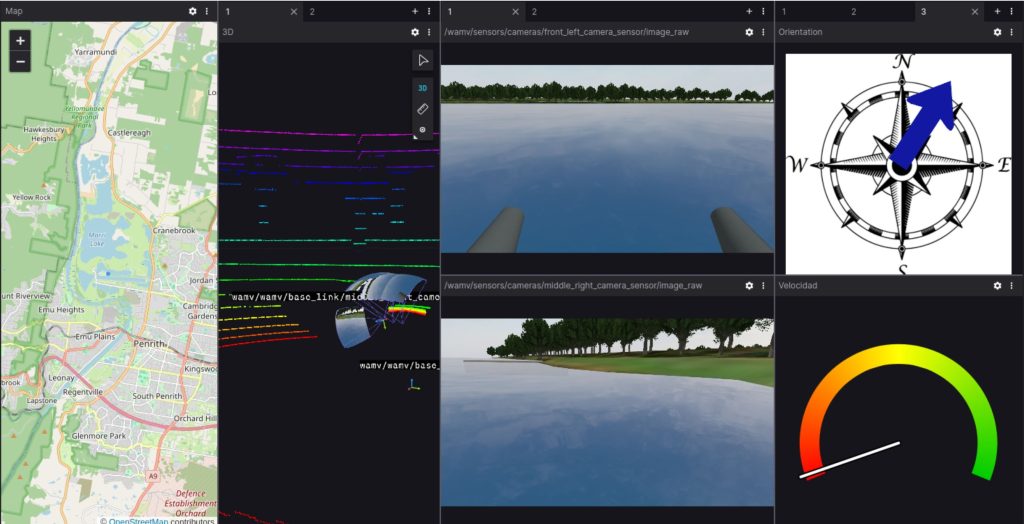
DEMO using Foxglove

Traditionally, tools from ROS 2 (Robot Operating System) are used to monitor sensor status, but the vessel’s numerous sensors required further automation and faster notifications. To this end, the researchers developed a customized software version based on Foxglove – a tool specifically geared for robotic dashboards – along with Python 3 code adapted to the catamaran´s requirements. Python3.

The end result was a functional dashboard capable of monitoring, identifying, and displaying connection errors between three sensors and the main computer onshore. This dashboard included data related to wind direction, global navigation satellite systems (GNSS), point clouds generated by a laser scanner, and real-time video feeds from the onboard cameras.
In addition to all the research related work, being an IPre program member in the Caleuche team gave Ignacio the opportunity to interact with more experienced students in a collaborative and enriching work environment.
Student in Mechanical Engineering
Department of Mechanical and Metallurgical Engineering
Student in Mechanical Engineering

students from The Caleuche Team. From left to right, top to bottom: Octavio Águila (captain), Gustavo Vidal (electronics), Cristián López (mechanics), Vicente Sufán (control), Cristián Nova (software), Ignacio Segura (mechanics), José Tomas Unger (dron), Paula Martínez (manager).