Department of Electrical Engineering
Portada » A robotic solution to support agriculture

Department of Electrical Engineering
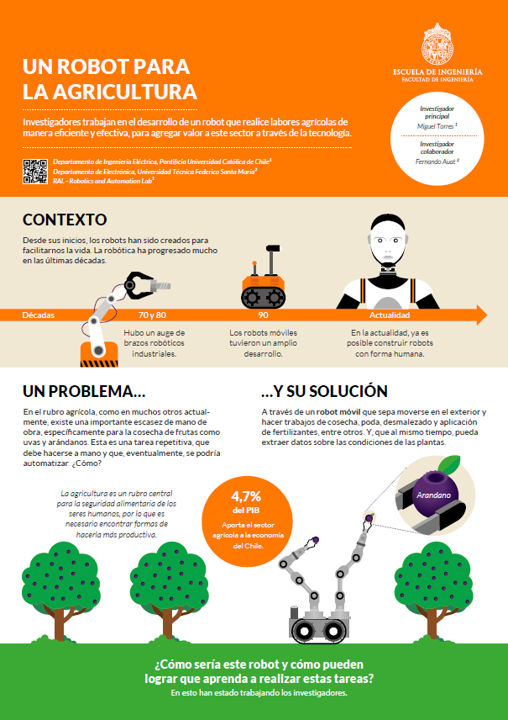
A common problem in many agricultural regions is the shortage of labor for certain tasks. The industry requires numerous repetitive activities across large, open fields, often outside controlled environments, including pruning, weeding, thinning, fertilizing, and harvesting. The challenge becomes even greater when harvesting small fruits, such as blueberries and strawberries, or more delicate ones like cherries and nectarines.
To address this need, Professor Miguel Torres is working on a robot designed to take on automated tasks that human labor struggles to manage. Robotics has undergone continuous development since the 1970s, with the design and implementation of mechanical arms developed for industries like mining and retail. However, designing and building robots that can assist workers and perform agricultural tasks present specific challenges, as it must carry out precise operations while moving across the uneven terrain of a plantation.
After studying the forces and movements involved in the robot’s tasks, the researchers concluded that the best design would include a mobile base and two arms for manipulating objects and interacting with the environment. These arms should be able to work collaboratively and in sync, assisting humans to tackle more complex procedures.
The next challenge was how to “teach” the robot to perform assigned tasks through algorithms; from harvesting, pruning, and applying fertilizers to taking photographs and detecting when plants need watering or are affected by pests. To guide its behavior, artificial intelligence strategies, such as “reinforcement learning”, were used, where the robot is rewarded with a score each time its action approaches the expected outcome. This and other similar methods focus on creating “adaptive control,” allowing the robot to respond to a wide range of unpredictable situations and continuously learn from its experiences.

Illustration that reflects the optimal design of the robot developed by the researcher and their team.
Department of Electrical Engineering
Currently, researchers are focused on improving the design and functionality of this robot, which is capable of working in agriculture, with an emphasis on optimizing three aspects: its sensors—its ability to perceive and process its surroundings—its learning, and its movements. These improvements would also represent an advancement in the development of mobile robots in general, which we may soon see performing multiple household tasks.


Robots developed from the initial prototype featuring a single arm to the optimized version. Both models include a mobile base with caterpillar tracks for navigation across various terrains, along with two robotic arms equipped with force and torque sensors.
Department of Electrical Engineering