Estudiante de Ingeniería Mecánica
Estudiante de Ingeniería Robótica
Estudiante de Ingeniería Robótica
Estudiante de Ingeniería Robótica
Departamento de Ingeniería Eléctrica e Ingeniería Mecánica y Metalúrgica
Universidad de los Andes




Investigación financiada por la Agencia Nacional de Investigación y Desarrollo de Chile (ANID), a través de los proyectos Fondecyt Iniciación 11250090 y Fondecyt Regular 1250842

Estudiante de Ingeniería Mecánica

Estudiante de Ingeniería Robótica

Estudiante de Ingeniería Robótica

Estudiante de Ingeniería Robótica

Departamento de Ingeniería Eléctrica e Ingeniería Mecánica y Metalúrgica
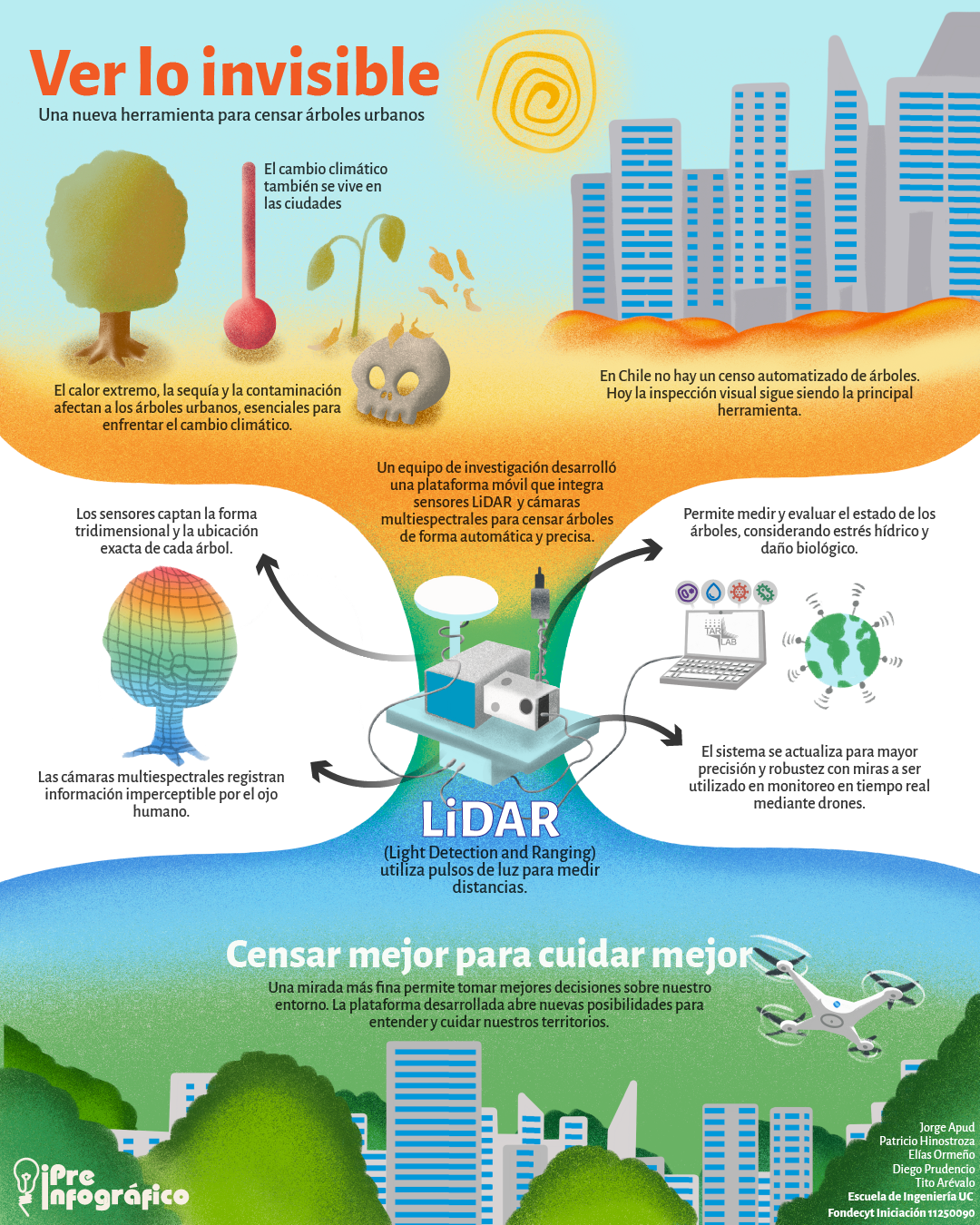
En un mundo donde las lluvias se vuelven impredecibles, las sequías más largas y los veranos insoportablemente calurosos, el cambio climático ya no es una amenaza lejana: es nuestra realidad. Este fenómeno global, impulsado principalmente por la quema de combustibles fósiles, la deforestación y las emisiones industriales, atrapa calor en la atmósfera y altera el ciclo del agua generando un estrés constante para la vegetación.
En este contexto, los árboles urbanos actúan como guardianes silenciosos de la ciudad: capturan dióxido de carbono (el gas de efecto invernadero que se libera a la atmósfera al quemar combustibles fósiles) y lo convierten en oxígeno, regulan la humedad ambiental al liberar agua a través de sus hojas (evitando que las calles se inunden o se sequen), y filtran contaminantes del aire. Para que sigan cumpliendo este rol vital y mitigando el efecto del cambio climático, necesitamos saber exactamente cómo se encuentran: si tienen un crecimiento saludable, si resisten daño causados por agentes biológicos (como insectos o microorganismos) o si se ven afectados por estrés hídrico.
Una solución para el censo de árboles
En Chile, el censo de árboles no se encuentra automatizado a pesar de que tecnologías existentes permiten obtener información esencial de manera automática y precisa. Esto significa que datos clave, como el tamaño de la copa, el diámetro del tronco o el Índice de Vegetación de Diferencia Normalizada (NDVI), necesarios para caracterizar la vegetación, no están registrados ni tabulados correctamente.

Buscando una solución innovadora frente a esta situación, un equipo de estudiantes de Ingeniería en Eléctrica, Ingeniería Mecánica y Metalúrgica y del Major de Robótica conformado por Jorge Apud, Patricio Hinostroza, Elías Ormeño y Diego Prudencio, bajo la dirección del profesor Tito Arévalo del departamento de Ingeniería Eléctrica e Ingeniería Mecánica y Metalúrgica, desarrolló como parte del curso de Investigación de Pregrado (IPre), una plataforma móvil que utiliza tecnología avanzada para censar árboles de manera automática y con mucha mayor precisión que las alternativas tradicionales que se basan inspección visual. Inspirados en investigaciones previas, integraron sensores LiDAR (Light Detection and Ranging, por sus siglas en inglés) y cámaras multiespectrales que revelan información imperceptible por el ojo humano, permitiendo medir y evaluar la vegetación de forma rápida, detallada y exacta.
Capturando información más allá de lo visible
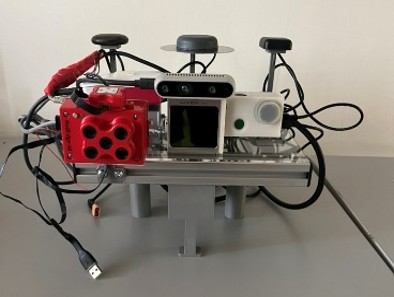
El equipo de investigación desarrolló un sistema móvil que funciona a partir de una plataforma con batería recargable y dos componentes principales: un sensor LiDAR, que mide distancias con pulsos de luz, y una cámara multiespectral que registra longitudes de onda fuera del espectro visible, como el infrarrojo. Este conjunto, que además incluye un GPS y un sensor de luz, permite generar nubes de puntos e imágenes multiespectrales para evaluar la vitalidad del follaje y caracterizar el estado del árbol.
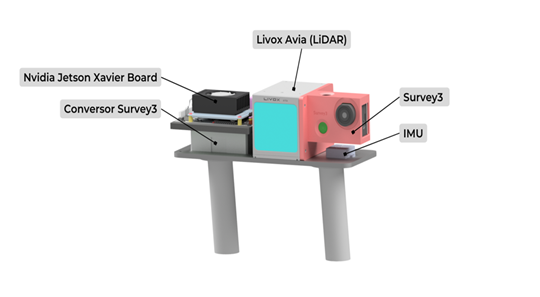

Diseño preliminar de la plataforma, el cual posteriormente fue ajustado por el equipo de investigación.
El corazón que le entrega vida a la plataforma
Para que la plataforma funcionara como un sistema completo, se desarrolló el software que coordina todos sus sensores utilizando ROS, un marco que permite integrarlos y hacerlos trabajar en conjunto. Antes de comenzar con la programación, se revisaron los métodos actuales de calibración y fusión de datos, lo que llevó a seleccionar el sistema de calibración desarrollado por el laboratorio de Mecatrónica y Sistemas Robóticos de la Universidad de Hong Kong (HKU-MaRS) y a adaptar el código entregado por el fabricante del LiDAR, LIVOX.
A partir de esa base, se realizaron sucesivas pruebas para corregir errores, mejorar la sincronización y ajustar el funcionamiento, de modo que las imágenes y los modelos 3D de los árboles coincidieran con precisión. En paralelo, se ordenó y documentó el código para facilitar su comprensión y uso por parte de terceros, asegurando que el software fuera realmente abierto y accesible. Finalmente, el código quedó disponible en GitHub para quienes deseen explorarlo o utilizarlo.

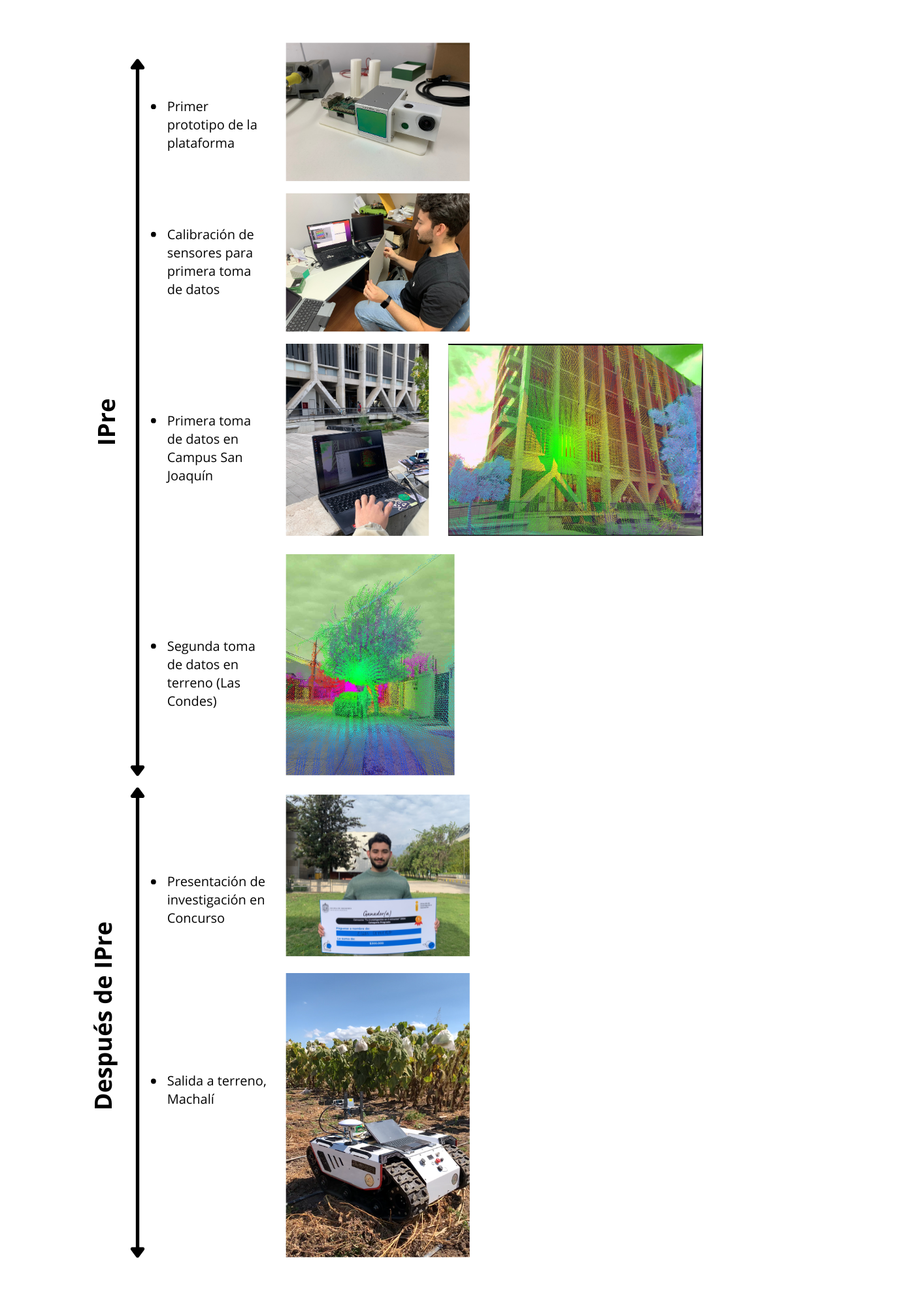
Toma de datos en terreno y resultados parciales de integración de sensores.
Calibrando y alineando datos
Para comparar correctamente las imágenes con las mediciones del LiDAR, el equipo tuvo que pasar de una calibración basada solo en la localización a un método más sólido: realizar múltiples tomas en ambientes controlados y ajustar la posición cuando era necesario. Ese cambio permitió alinear ambos datos con mayor precisión.
La integración también fue exitosa, puesto que la información del LiDAR y de la cámara multiespectral pudo combinarse tanto de forma visual como analítica, facilitando la comparación de las imágenes con las mediciones LiDAR. No obstante, aún existen mejoras a implementar. Además, toda la implementación del sistema (la plataforma completa y su software), fue registrada y explicada paso a paso, dejando una guía clara para que otros puedan replicarlo. Esta guía se publicará en GitHub una vez que se concluya su revisión final.

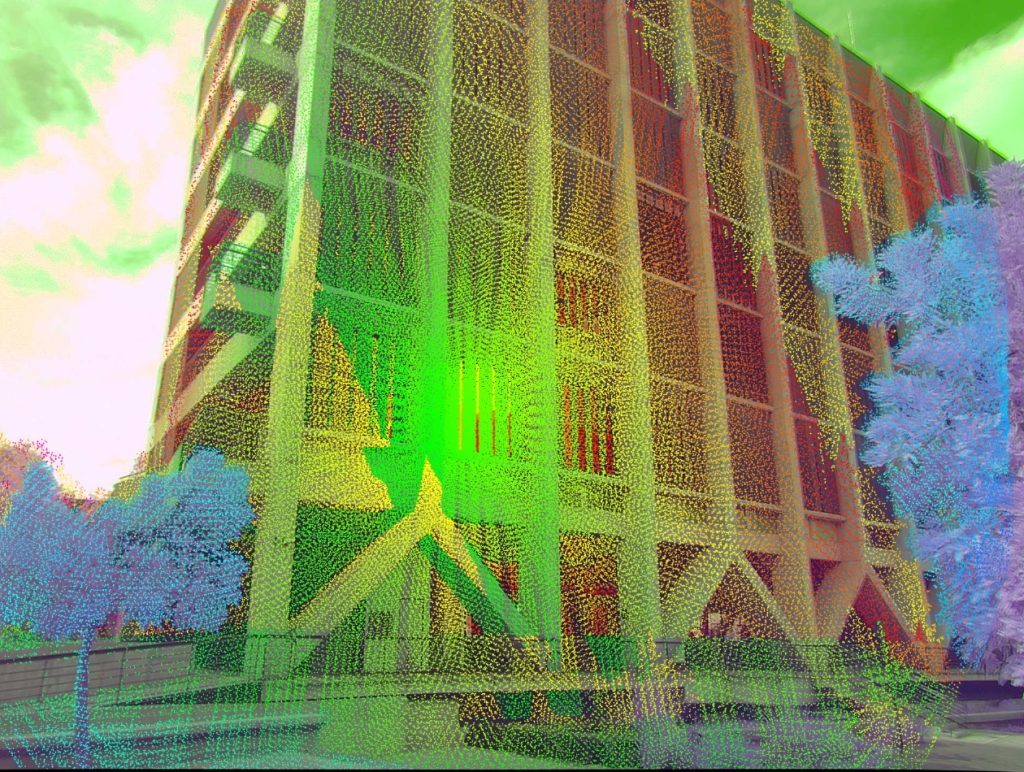
Resultado de la segunda toma de datos en terreno tras la optimización del sistema.
Un sistema que sigue creciendo
Últimamente, la plataforma se ha ido actualizando para incorporar no solo una cámara multiespectral, sino también una cámara RGB, acelerómetros y sensores de posicionamiento satelital (GNSS). Con esta integración el equipo de investigación podrá hacer mediciones georreferenciadas de los árboles, es decir, registrar su ubicación exacta y así identificar de forma mucho más directa cuáles requieren mantenimiento.
Ahora bien, sumar estos sensores también ha implicado un aumento de la carga de procesamiento. El computador utilizado actualmente ya no alcanza a responder a la demanda computacional del sistema completo. Por eso, el siguiente paso es mejorar el hardware incorporando una Jetson ORIN Nano, que permitirá procesar los datos en tiempo real de manera más robusta.
Además, el equipo planea optimizar el sistema de alimentación, el cableado y la sincronización por hardware entre sensores, con el fin de mejorar la estabilidad y confiabilidad de las mediciones.


Registro de datos en terreno, empleando la plataforma mejorada en una plantación de cerezos
Estudiante de Ingeniería Mecánica
Estudiante de Ingeniería Robótica
Estudiante de Ingeniería Robótica
Estudiante de Ingeniería Robótica
Departamento de Ingeniería Eléctrica e Ingeniería Mecánica y Metalúrgica
Universidad de los Andes
Investigación financiada por la Agencia Nacional de Investigación y Desarrollo de Chile (ANID), a través de los proyectos Fondecyt Iniciación 11250090 y Fondecyt Regular 1250842
Este proyecto demuestra que es posible enfrentar desafíos globales como el cambio climático desde un enfoque distinto: observar con mayor detalle nuestros árboles para comprender mejor su estado, detectar riesgos, anticiparlos y tomar decisiones inteligentes. El sistema desarrollado evidencia un buen desempeño en la medición de árboles urbanos y, gracias a la documentación elaborada por el equipo, su replicación será sencilla, lo que permitirá seguir avanzando hacia mediciones cada vez más precisas en distintos entornos por otros usuarios.
Este trabajo también revela como una mirada más fina sobre la vegetación puede mejorar la forma en que gestionamos cualquier entorno, desde ciudades hasta zonas rurales. Tras las mejoras técnicas incorporadas, como la integración de nuevos sensores, cámaras y un sistema de procesamiento más robusto, se podría avanzar hacia trasladar la tecnología desarrollada a plataformas más versátiles, como drones, para ampliar el monitoreo a zonas más extensas y difíciles de alcanzar. Así, esta iniciativa que hoy germina como una pequeña semilla, tiene el potencial para convertirse en una herramienta transformadora para entender y cuidar nuestros territorios.
Hacia un Futuro más Verde

Estudiante de Ingeniería Mecánica
Departamento de Ingeniería Eléctrica e Ingeniería Mecánica y Metalúrgica
