Estudiante en Ingeniería Mecánica
Departamento de Ingeniería de Mecánica y Metalúrgica

Portada » Desarrollo de un dashboard para un catamarán autónomo

Estudiante en Ingeniería Mecánica
Los avances de la robótica y de la inteligencia artificial han influido en los más diversos ámbitos de la ingeniería, y los medios de transporte y la navegación marítima no han sido la excepción. Desarrollar tecnologías que permitan la autonomía de las embarcaciones o herramientas para mejorar la precisión al momento de navegar y evitar accidentes, es fundamental, especialmente para un país con una costa tan extensa como la chilena.
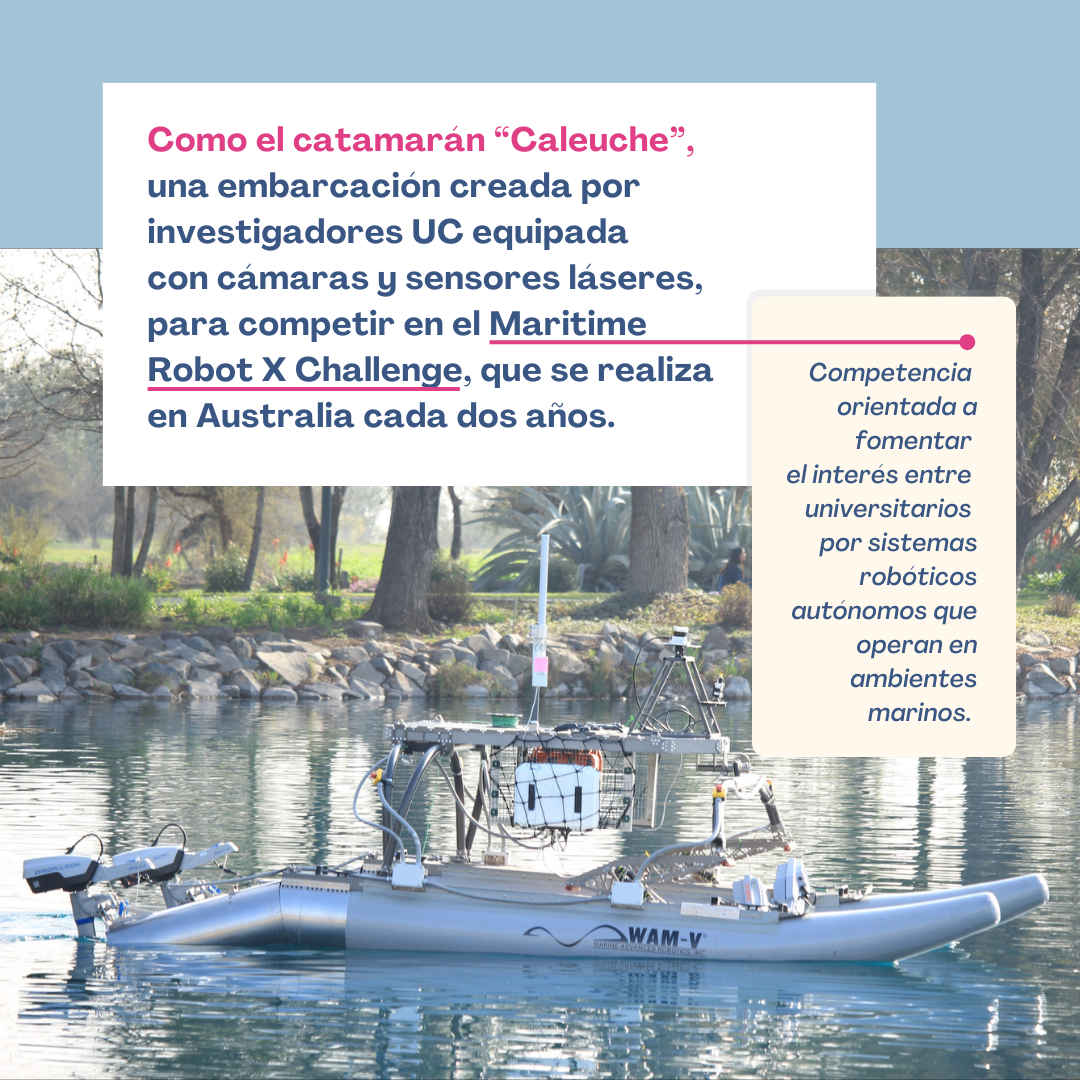
En este contexto surge en 2022, de la mano del profesor de la Escuela de Ingeniería, Giancarlo Troni, el proyecto Caleuche. Este es el nombre de un catamarán de 5 metros de largo y 150 kilos, equipado con cámaras y sensores láseres, que se creó para competir en el Maritime Robot X Challenge que se realiza cada dos años en Australia. Una competencia internacional realizada a nivel universitario creada para fomentar el interés entre los estudiantes por los sistemas robóticos autónomos que pueden operar en el aire, en la tierra o en el agua.
En el acondicionamiento del catamarán participó un equipo de estudiantes de pregrado de distintos niveles y especialidades. Entre ellos, el estudiante Ignacio Segura, en ese momento en segundo año de Ingeniería Civil Industrial. Una de las tareas principales que asumieron los alumnos y alumnas en el laboratorio de robótica fue el desarrollo de un software que, utilizando herramientas de IA, fuera capaz de interpretar información para que el robot tomara sus propias decisiones y pudiera superar así diversas pruebas en el agua.
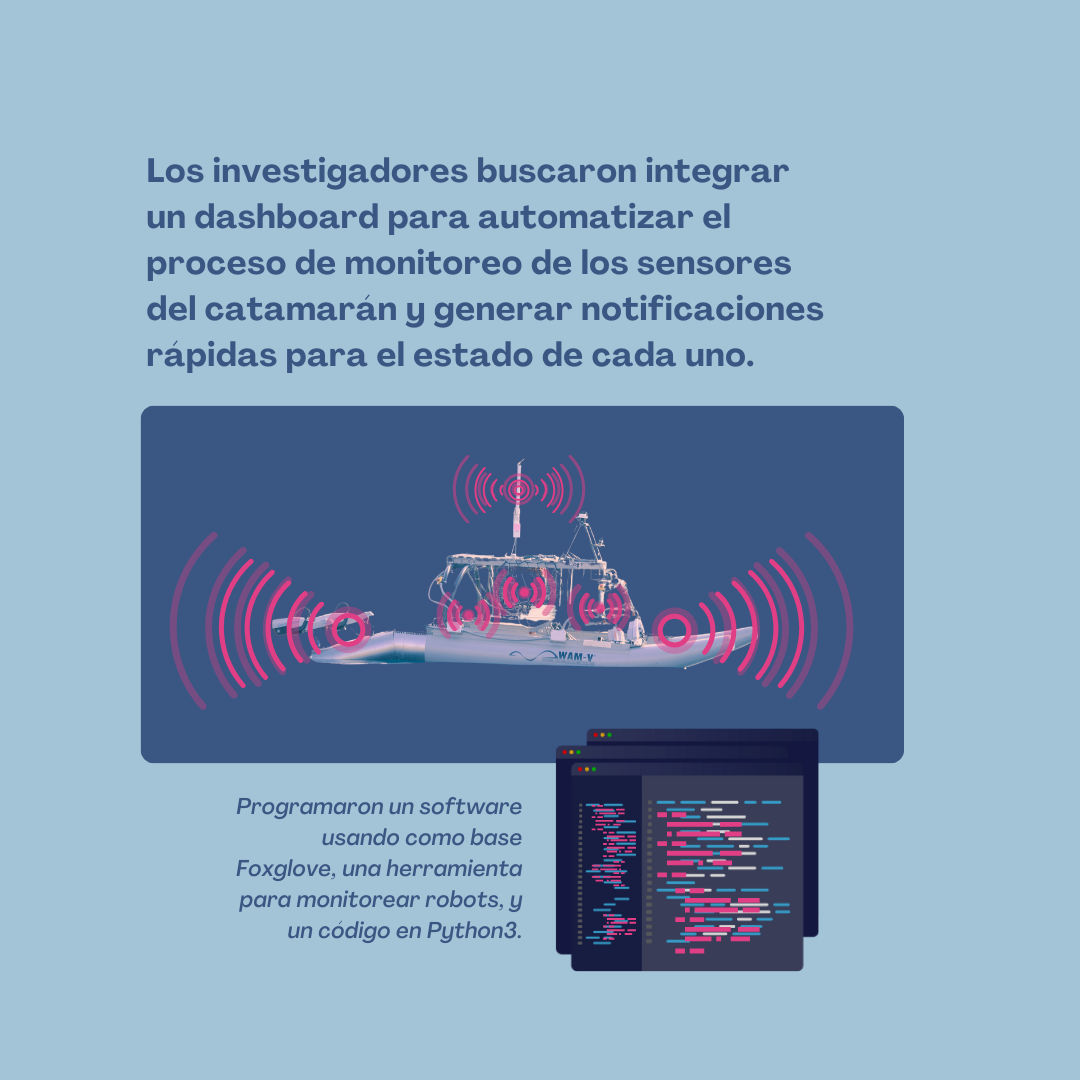
La labor de Ignacio, en particular, estuvo centrada en el área de programación y en el desarrollo de un dashboard o interfaz gráfica que permitiera automatizar el proceso de monitoreo de los sensores del catamarán y la detección temprana de posibles fallos que la embarcación pudiera experimentar durante la competencia, principalmente asociados a problemas de conexión entre los sensores y el computador principal.
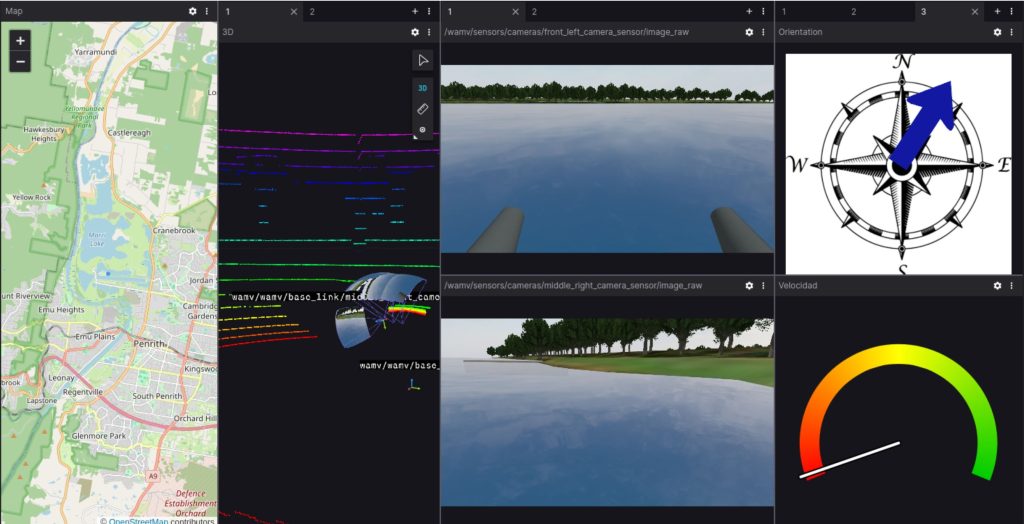
DEMO realizada en Foxglove

Si bien, tradicionalmente se utilizaba la herramienta integrada en ROS 2 (Robot Operating System) para monitorear los estados de los sensores, debido a que el catamarán cuenta con una gran cantidad de sensores se hizo necesario automatizarlos y generar notificaciones rápidas para el estado de cada uno. Para esto los investigadores programaron un nuevo software, que se adaptara a los requerimientos del proyecto, usando como base Foxglove, una herramienta utilizada para la creación de dashboards para robots, y un código en Python3.

Estudiante en Ingeniería Mecánica
Departamento de Ingeniería de Mecánica y Metalúrgica
Estudiante en Ingeniería Mecánica
Sobre su experiencia en una investigación de pregrado, Ignacio dice:
“Cuando entré no sabía nada de programación, pero le perdí el miedo a no saber. Si uno decía ‘no sé’, la respuesta era ‘ok, investiguemos’”.

Estudiantes miembros del equipo el Caleuche. De izquierda a derecha, arriba a abajo: Octavio Águila (capitán), Gustavo Vidal (eléctrica), Cristián López (mecánica), Vicente Sufán (control), Cristián Nova (software), Ignacio Segura (mecánica), José Tomas Unger (dron), Paula Martínez (administradora).