Departamento Ingeniería Eléctrica
Portada » Una solución robótica para apoyar a la agricultura
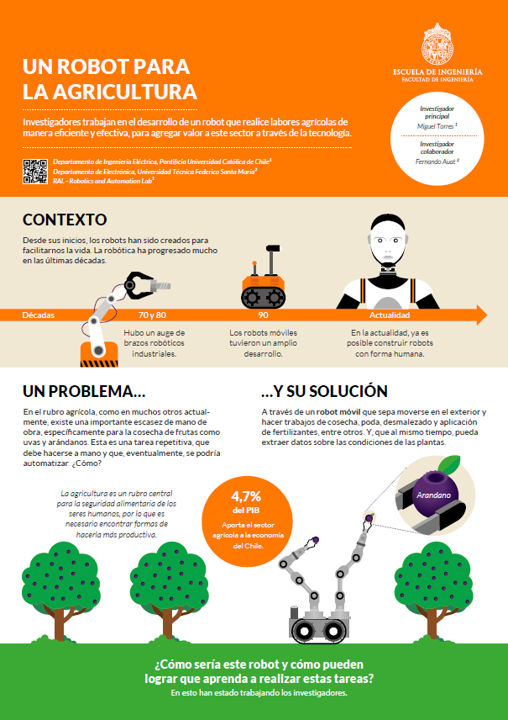
Un problema que se repite en diversas zonas agrícolas es la escasez de mano de obra para ciertas tareas. En esta industria deben realizarse muchas labores repetitivas a lo largo de amplios terrenos abiertos, fuera de un área controlada, tales como la poda, el desmalezado, el raleo, la aplicación de fertilizantes y la cosecha. Este último punto se vuelve especialmente demandante cuando se trata de cosechar frutos pequeños como arándanos y frutillas o delicados como las cerezas y nectarines.
En pos de esta necesidad, el investigador Miguel Torres trabaja en un robot que pueda resolver esas tareas automáticas para las que la mano de obra humana no da abasto. La robótica ha tenido un desarrollo sostenido desde la década de 1970, con la fabricación de brazos capaces de trabajar en industrias como la minería o el retail. Pero diseñar y construir un robot que sea capaz de ayudar a trabajadores y resolver tareas agrícolas, plantea desafíos particulares ya que estos deben realizar tareas con precisión mientras se desplazan en los irregulares terrenos de una plantación.
Luego de estudiar las fuerzas y movimientos implicados en las funciones que debería poder cumplir el robot, los investigadores concluyeron que el diseño óptimo consistía en una base que le permita desplazarse y dos brazos para manipular elementos e interactuar con el entorno. Estos deberían ser capaces de trabajar coordinados y de manera colaborativa, como asistentes a las personas, para resolver así desafíos más complejos.
El desafío siguiente fue cómo “enseñarle” a hacer las tareas asignadas por medio de algoritmos; desde cosechar, podar, aplicar fertilizantes y tomar fotografías, hasta reconocer cuándo las plantaciones necesitan riego o presentan alguna plaga. Para guiar su comportamiento se utilizaron estrategias de inteligencia artificial como “aprendizaje reforzado”, es decir, se le entrega un puntaje que cumple la función de “premio” cada vez que su acción se acerca a lo esperado. Esta técnica, junto a otras, apunta a desarrollar un “control adaptativo”, lo que significa que el robot pueda reaccionar frente a circunstancias variadas e inesperadas, y aprenda constantemente de sus interacciones.

Ilustración que refleja el diseño óptimo del robot desarrollado por el investigador y su equipo.
Departamento Ingeniería Eléctrica
Actualmente, los investigadores se enfocan en mejorar el diseño y funcionamiento de este robot capaz de trabajar en la agricultura, con énfasis en optimizar tres aspectos: sus sensores, es decir, su capacidad de captar y procesar lo que sucede en su entorno; su aprendizaje, y sus movimientos. Estas mejoras, además, significarían un avance en el desarrollo de los robots móviles a nivel general, los que pronto podríamos ver realizando múltiples tareas domésticas en los hogares.


Robots construidos desde el primer prototipo con un solo brazo hasta la versión optimizada. Ambas versiones consisten de una base móvil con tracción de orugas para desplazarse sobre todo tipo de terreno y dos brazos robóticos con sensores de fuerza y torque.

Departamento Ingeniería Eléctrica